This shows that proportional-integral control eliminates the step response steady state error and allows for more control over the transient response (compared to only P or only I control) because both the damping ratio and natural frequency can be altered using the gains.
Does integral control increases the steady state error?
Integral controller reduces both the steady state error and the relative stability because it adds one pole to the system. Integral control is based on the principle that the controller’s output should be proportional to both the magnitude and duration of the error.
What is the steady state error of a control system?
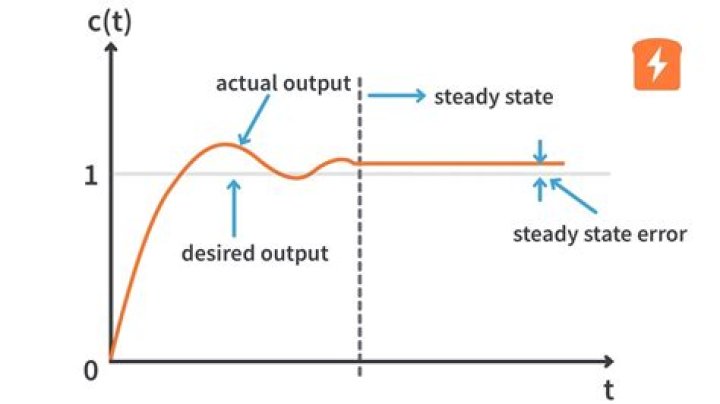
Steady-state error is defined as the difference between the input (command) and the output of a system in the limit as time goes to infinity (i.e. when the response has reached steady state). The steady-state error will depend on the type of input (step, ramp, etc.) as well as the system type (0, I, or II).
How do you calculate steady state error in a control system?
The deviation of the output of control system from desired response during steady state is known as steady state error. It is represented as ess….Example.
| Input signal | Error constant | Steady state error |
|---|---|---|
| r2(t)=2tu(t) | Kv=lims→0sG(s)=∞ | ess2=2Kv=0 |
| r3(t)=t22u(t) | Ka=lims→0s2G(s)=1 | ess3=1ka=1 |
How does integrator eliminate steady-state error?
Integrator as a Compensator: Eliminates the steady-state error, since it increases the system Type; however, our desirable closed-loop pole A is no longer on the root locus; this is because the new pole at s=0 changes the total angular contributions to A so that the 180° condition is no longer satisfied.
What is integral controller in control system?
The integral controller produces an output, which is integral of the error signal. The block diagram of the unity negative feedback closed loop control system along with the integral controller is shown in the following figure. The integral controller is used to decrease the steady state error.
How the integral controller reduces the offset or steady state error to zero?
Automatic reset or integral action corrects for any offset between setpoint and process variable automatically by shifting the proportional band over a pre-defined time. The integral time repeats the proportional action over the time set.
What is the advantage of integral controller?
Advantages of Integral Controller Due to their unique ability, Integral Controllers can return the controlled variable back to the exact set point following a disturbance that’s why these are known as reset controllers.
How is the steady-state error reduced by the insertion of an integral controller?
Integral action is used to overcome the steady state error . By using integral action, u can eliminate the steady state error and would easily track the desired set-point. Static error is intrinsic of Proportional controller operation. Look at the transfer function of a Proportional-controlled process.
What is the steady-state error in control systems?
Steady-state error is a property of the input/output response for a linear system. In general, a good control system will be one that has a low steady-state error. First, we will discuss the steady-state error in a first-order transfer function by analyzing its steady state response.
How does integral control reduce the steady state error?
Integral controller reduces both the steady state error and the relative stability because it adds one pole to the system. Integral control is based on the principle that the controller’s output should be proportional to both the magnitude and duration of the error. The controller’s output will continue to change its value until the error is zero.
Which input will yield a finite steady-state error?
The only input that will yield a finite steady-state error in this system is a ramp input. We wish to choose K such that the closed-loop system has a steady-state error of 0.1 in response to a ramp reference. Let’s first examine the ramp input response for a gain of K = 1.
How do you calculate steady-state error?
Steady-state error can be calculated from the open- or closed-loop transfer function for unity feedback systems. For example, let’s say that we have the system given below. This is equivalent to the following system, where T (s) is the closed-loop transfer function.
