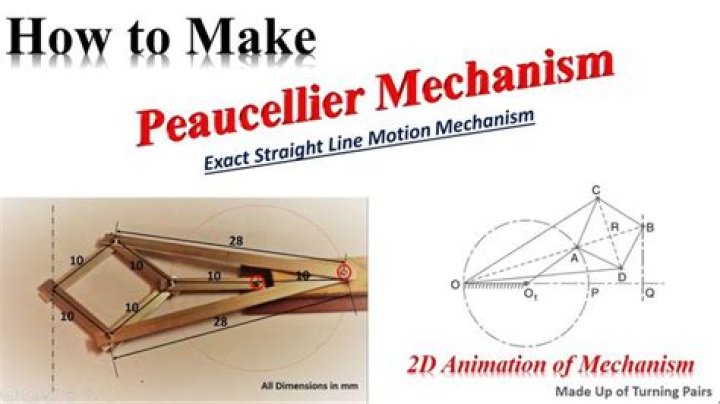
The Peaucellier mechanism generates exact straight lines, meeting some restrictions among their links dimensions and the input angle. The mechanism has eight links, but due to those initial restrictions, only requires to find relations among three of its eight links and rotation angle.
How many links are in Scott Russel mechanism?
The mechanism is composed of two links AC and BD, where a flexible hinge at point A connects these two links. The links AB, AC, and AD have the same length.
What is spatial mechanism?
Spatial mechanisms are essentially three-dimensional mechanisms such that one or more members of such a mechanism move in a plane different to others. Learn more in: Telesurgical Robotics and a Kinematic Perspective.
What is meant by Peaucellier mechanism?
The Peaucellier–Lipkin linkage (or Peaucellier–Lipkin cell, or Peaucellier–Lipkin inversor), invented in 1864, was the first true planar straight line mechanism – the first planar linkage capable of transforming rotary motion into perfect straight-line motion, and vice versa.
Which of the following mechanism consists of 8 links?
Peaucellier Mechanism
Peaucellier Mechanism: It consists of 8 links, connected by turning pairs. Harts Mechanism: It consists of six links, connected by turning pairs.
What are the limitations of Scott Russell mechanism?
The Scott–Russell (SR) amplifying mechanism [1] is designed for a cutting tool to amplify the PA displacement and carry out high precision for the motion control system. Although the PA has many advantages, its main drawback is the hysteresis phenomena, which arises from material polarization and molecule friction [2].
Which mechanism is made up of turning pairs?
Explanation: All the mechanisms mentioned above consists of exact straight line motion. Scott-Russell’s mechanism consists of sliding pair whereas Peaucellier’s mechanism and Hart’s mechanism consists of turning pair.
What is link in mechanism?
linkage, in mechanical engineering, a system of solid, usually metallic, links (bars) connected to two or more other links by pin joints (hinges), sliding joints, or ball-and-socket joints so as to form a closed chain or a series of closed chains.
